CAUTION: This page is not maintained and has been archived. Please see the research page.
 | Subo: ROS based robot using monocular SLAM
|
| | Design and fabrication of experimental setup for kinematic and dynamic analysis
|
 | Analysis of GAN and its variants
|
 | Autonomous Drone Navigation using Fiducial Markers
|
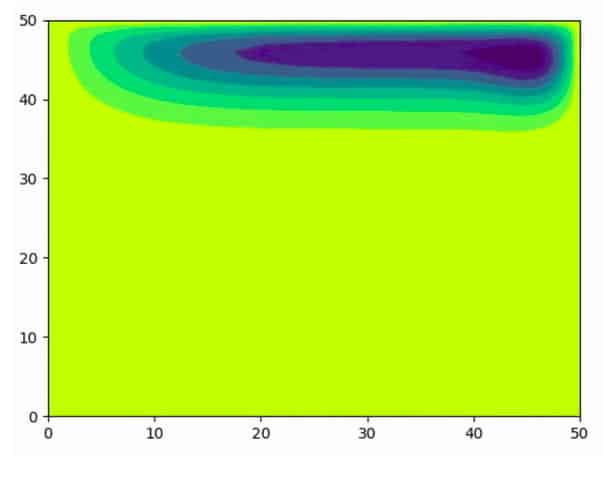 | CFD Analysis Lid Driven Cavity Problem
|
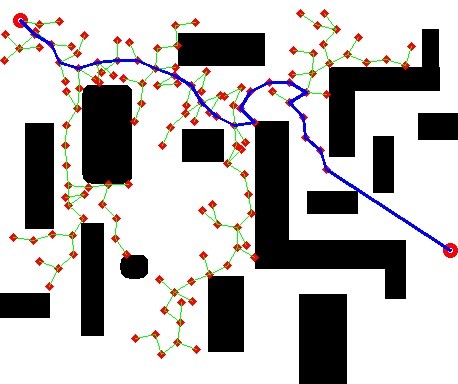 | Maze Solver using Rapidly Exploring Random Tree (RRT)
|
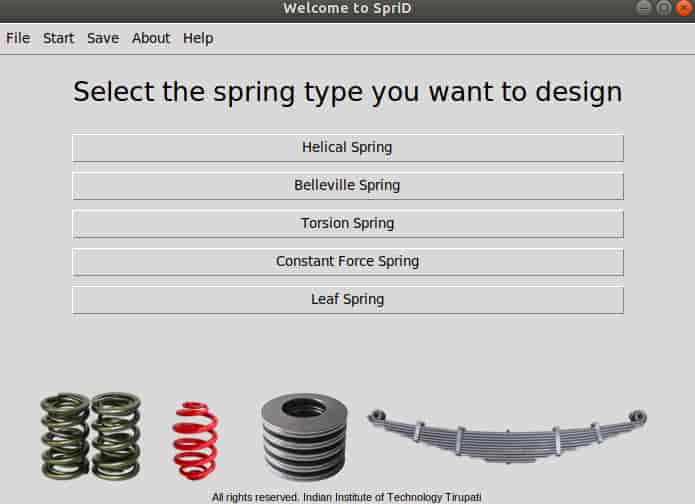 | Helical Spring Designer
|
 | Persistence of Vision Display
|