Robotics: Past, present, and future
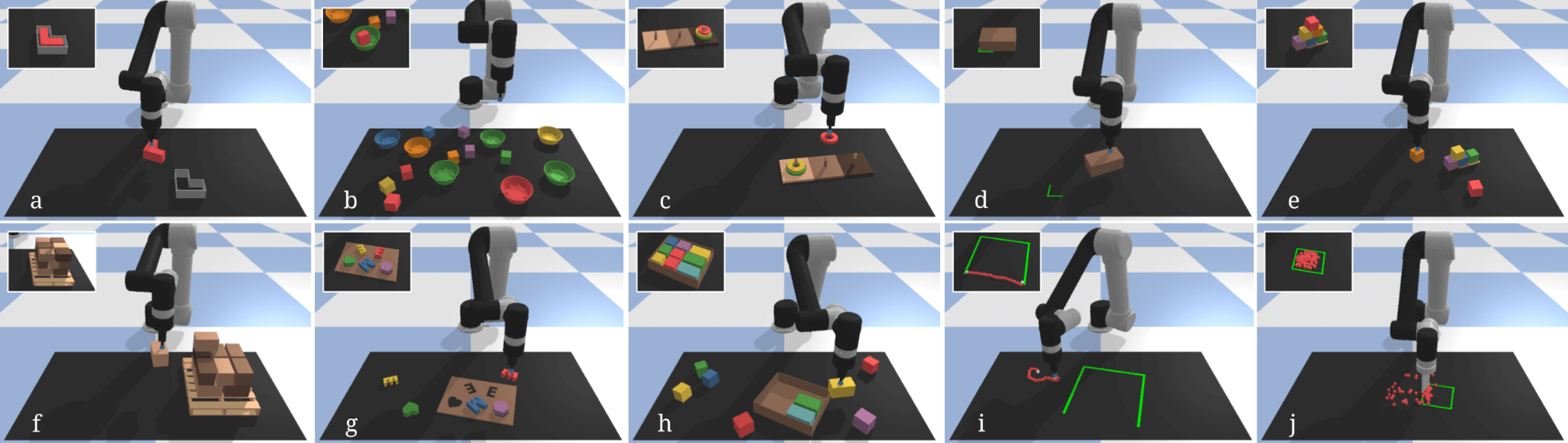
Fig.1: Google Ravens showing 10 tabletop simulated rearrangement tasks in PyBullet [1]
This article outlines the vision, goal, and challenges faced in robotics research. It provides a brief overview of the current state of robotics, its research, and the challenges faced by the robotics community. Towards the end, it talks about the exciting future the robotics community as a whole has to offer.
Significant developments in robotics started with the industrial revolution. The early robots very quite simple in function and were employed only for particular purposes. The majority of them were specifically developed for the industrial environment, and other applications we seen in today’s world were either absent or were in infancy. Today, developments in robotics are happening faster than ever, with new ideas and papers popping up at unprecedented rates. To a person unacquainted with the latest research and developments, robotics might appear quite stale and something limited to the factory environment (with a repetitive hardcoded task. In reality, the field of robotics is exceptionally vast in itself and requires knowledge from a variety of disciplines. The majority of the current work focuses on one of these subareas: robot learning (tasks such a grasping, walking), navigation (vision, SLAM, LiDARs), design (mechanism, compliant), Human-Robot-Interaction, and more. The earlier notion of robots working in the confined factory environment is rapidly changing, and robotics makes its space in numerous newly envisioned areas.
A major portion of the robotics research at present focuses on building intelligent machines with human-like ability. One of the goals of robotic research is to generalize to the maximum extent possible. For example, instead of creating a robot to grasp a specific object (or type), the focus is on grasping various object types (rigid, deformable, soft). A major challenging task is a sim to real transfer, many a time the research community needs to devise solutions by using physics-based simulators, as real-world experiments are very costly. Such simulators are quite popular now (i.e., PyBullet, OpenAI Gym, etc.) for learning-based tasks as they are fast, cheap, and easily accessible. The major problem arises when the learning is transferred to the real-world system, i.e., the physical robot, due to several potential issues such as inaccurate model representation resulting in undesirable behaviors. At times, research work doesn’t include real-world experiments due to various constraints, severely affecting research reproducibility. Furthermore, due to the dynamic nature of the real-world system and inaccuracies, it might not be possible to accurately replicate the experiments even if they might have been tested previously in the real world. Reproducibility is challenging in this area, and it significantly hampers the research output. Even though there are methods that real experiments have validated, there is a high tendency of failure as often the tests are conducted in a well-designed lab setting which eliminates the harshness and new unseen challenges of the actual environment. This level of generalization is a big challenge and needs to be addressed to unleash the robotics capabilities.
The hardcoded nature of robots and confined workspaces is no longer the optimal solution for many tasks requiring flexibility and agility, and there is a need to develop. More can be achieved by designing unrestrained intelligent machines. Advancements in robotics can significantly transform people’s lives in numerous aspects, including rescue, rehabilitation, security, and social health. Another emerging area is the Human-Robot-Interaction (HRI), which shall help improve the combined system performance by inculcating trust in the two players. At present, there is a myriad of dangerous tasks such as hazardous rescue operations and tasks such as manual scavenging that people are conditioned to perform due to a lack of alternatives. With the ongoing research and advancement, robotics shall transform people’s lives fundamentally and in several aspects. Building robots similar to humans in terms of agility, perception, and motor skills hold significant weight and potential.
References
[1] Zeng, Andy, et al. “Transporter networks: Rearranging the visual world for robotic manipulation.” arXiv preprint arXiv:2010.14406 (2020).